本文首先回顾几种基本的非线性规划算法
然后整理求解混合整数约束非线性规划问题的文献
并且使用matlab进行算法实现
最后列举实际例子进行求解
无约束非线性规划模型
黄金分割法 golden section method
- 任务目标 :找一维函数极小值
- 基本思想 :步步紧逼,逐次缩小范围
- 设定搜索精度
- 区间内部插入两个点,分其为三段。通过比较两个端点和插入的两个点的函数值大小,划分新的搜索区间
- 适用范围 :一维函数,单峰函数
link - 一维搜索方法/黄金分割法(附matlab代码)
如果目标函数不是一维怎么办?多维度目标函数我们能不能转换成一维搜索?
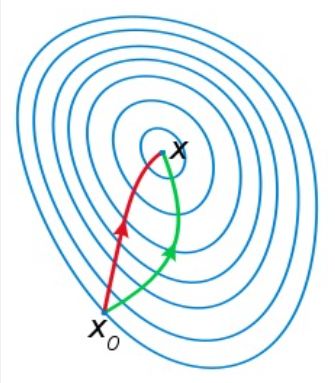
最速下降法
- 任务目标 :找多维函数极小值点
- 基本思想 :多维函数一维化(负梯度方向+一维搜索方法)
- 一维化过程(确定搜索方向) :$P^{(i)}=-\nabla f(x)^{(i)}\rightarrow$ 第$i$次迭代的负梯度方向
- 一维搜索(计算搜索步长) : $f(x^{(i)}+\lambda^{(i)}P^{(i)})=\underset {\lambda>0}{\min}f(x^{(i)}-\lambda^{(i)}\nabla f(x)^{(i)})$
- 适用范围 :目标函数容易求导,梯度方向收敛较快
但是,负梯度方向不一定是函数值下降最快方向。因为每次迭代选择的梯度方向只是起始点的梯度方向,并不能反映起始点和终点之间其他点的梯度方向。
link - 梯度下降法和最速下降法的细微差别

那么,考虑梯度的变化方向会不会加快收敛速度呢?
牛顿法(最速下降法 pro)
牛顿法就是在最速下降法的基础上添加目标函数梯度的变化的影响,也就是Hessian矩阵。
$$f(x)\approx Q(x)=f(x)^{(k)}+\nabla {(f(x^{(k)})}^T(x-x^{(k)})+\frac{1}{2}(x-x^{(k)})^T\nabla ^2f(x^{(k)})(x-x^{(k)})$$
其中$\nabla ^2f(x)$是Hessian矩阵
令 $\nabla Q(x)=0$,可以求解得到一个极小值点。
把这个极小值点作为下一次迭代点,直到小于精度时停止迭代。
- 基本思想 :最速下降法+Hessian矩阵
- 适用范围 :容易求得矩阵导数,容易求得Hessian矩阵
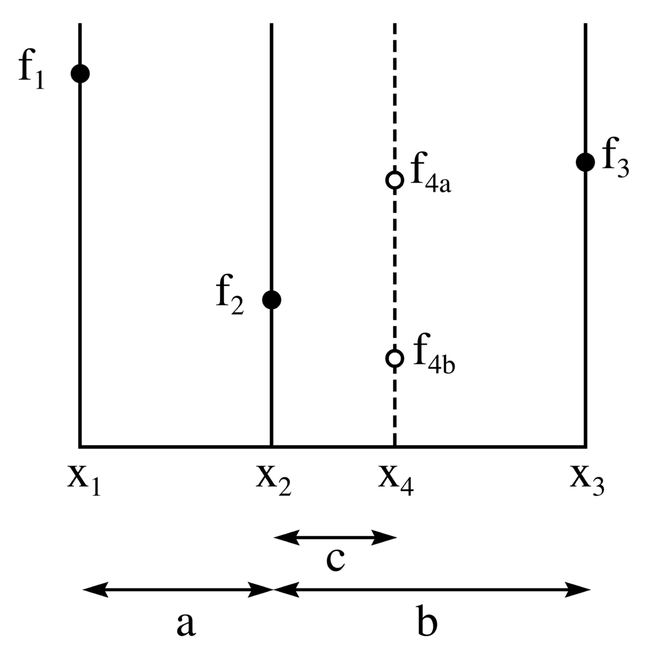
模式搜索法
上面介绍的几种方法都需要知道一阶或者二阶导数。如果求不到导数,或者目标函数是离散的,又怎么办呢?
- 基本思想 :多维问题一维化+每个维度左右尝试
- 适用范围 : 离散问题,无法求导
link - wiki:模式搜索
有约束非线性规划模型
旧问题的答案也是新问题的答案。
- Woz·G·Schwarld
有约束非线性规划模型一般数学形式:
$$ \min f(x),
s.t.\left {
\begin{aligned}
g_i(x) & \geq 0& i=0,1,…,m , \
h_i(x) & = 0& j=0,1,…,l \
\end{aligned}
\right.
$$
下面介绍的两种方法都是把有约束问题转化为无约束问题。
- 外点罚函数法
将约束项添加进目标函数中。当解落在可行域外时,约束项陡增,迫使解落回可行域。 - 内点罚函数法
仍然将约束项添加进目标函数中。但是这次所有解都在可行域中,一旦解接近范围边界,约束项就会陡增,迫使解始终在远离范围边界的可行域中迭代。
link - 罚函数法
混合整数非线性规划模型
非线性规划+整数规划
正如引言所说,旧问题的答案也是新问题的答案。
混合整数非线性规划模型可以是非线性+整数规划的叠加
| 整数规划 | 非线性规划 |
|---|---|
| 割平面法 | 罚函数法 |
| 分支定界法 | 可行方向法 |
| 投影梯度法 | |
| 反应曲面法 |
link - 可行方向法
link - 投影梯度法
link - 复合形法
link - 反应曲面等代理模型
根据乘法原理,我们最多可以得到8种混合整数非线性规划模型,尽管他们中有些并不合理。
除此之外,各种启发式算法也可以用于求解混合整数非线性规划。
遗传算法
link - 遗传算法
模拟退火
link - 模拟退火
粒子群优化
link - 粒子群优化
代理模型算法 surrogate model
link - 代理模型
matlab算法实现介绍
代理模型
1 | [x,fval,exitflag] = surrogateopt(objconstr,____) |
该算法在多个维度上搜索实值目标函数的全局最小值,受多种条件约束:
- 目标函数
objconstr.Favl - 边界
lbub, 输入约束的下界和上界 - 可选不等式线性约束
Ab, 输入线性不等式约束 - 可选等式线性约束
Aeqbeq, 输入线性不等式约束 - 可选整数约束
intcon, 输入为整数的变量的标号 - 可选非线性不等式约束
obconstr.Ineq
surrogateopt函数返回一个结构体
x返回最小值点fval实数解处的目标函数值exitflag退出标志
算法
surrogateopt重复执行这些步骤:
- MinSurrogatePoints 通过在边界内随机采样点来创建一组试验点,并在试验点处评估目标函数。
- 通过在所有随机试验点内插径向基函数来创建目标函数的代理模型。
- 创建一个评价函数,为代理项赋予一些权重,对与试验点的距离赋予一些权重。通过在现有点(自上次代理重置以来找到的最佳点)周围的区域中随机采样评价函数来定位评价函数的一个小值。使用这个称为自适应点的点作为新的试验点。
- 在自适应点评估目标,并根据该点及其值更新代理。如果目标函数值远低于观察到的先前最佳(最低)值,则计算“成功”,否则计算“失败”。
- max(nvar,5)如果在失败 之前发生了 3 次成功,则向上更新样本分布的离散度,其中nvar是维数。max(nvar,5)如果失败发生在三个成功之前,则向下更新离散度。
- 从步骤 3 继续,直到所有试验点都在MinSampleDistance评估点范围内。此时,通过丢弃代理中的所有自适应点来重置代理,重置量表,然后返回步骤 1 以创建MinSurrogatePoints 新的随机试验点进行评估。
Solve Nonlinear Problem with Integer and Nonlinear Constraints
一个栗子
$$
\max f(x)=26(x_1-1)^2+50x_2+60x_3,\
s.t.\left{
\begin{aligned}
10 \leq 12x_1+4x_2+18x_3\
20x_1+x_2+25x_3\leq 300\
10x_1^2+4x_2+3x_3^2\leq 100\
0\leq x_i\leq 20,i=1,2,3\
x_3\in \Bbb Z\
\end{aligned}
\right.
$$
1 | clc;clear all;close all; |
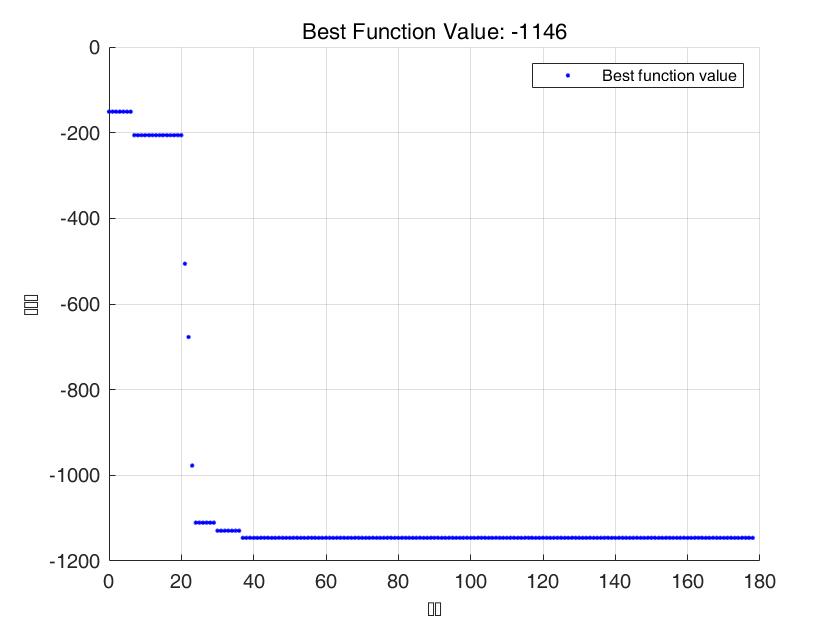
最优解为:$[ 0; 20; 2 ]$